東芝(車谷暢昭社長)は11月30日、カメラで撮影した画像から、不規則に積み重なった物体を高精度に推定するAIを開発したと発表した。このAIを物流ロボットなどに搭載することで、荷降ろしやピッキングなどの作業をより正確に行うことが可能になるという。
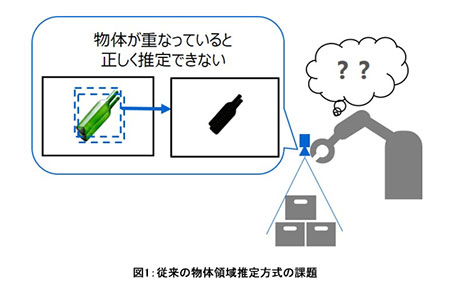 従来の方式は物体を範囲で認識していたため重複する物体を正しく推定できなかった
従来の方式は物体を範囲で認識していたため重複する物体を正しく推定できなかった
近年、荷降ろしやピッキングなど物流現場でロボットによる自動化が進みつつある。一方、これらの作業を自動化するには乱雑に積み重なった荷物をロボットが正確に認識する必要があり、従来の認識方式では複数の物体が大きく重複した場合、一つの物体として認識してしまうなど正しく推定できない課題があったという。
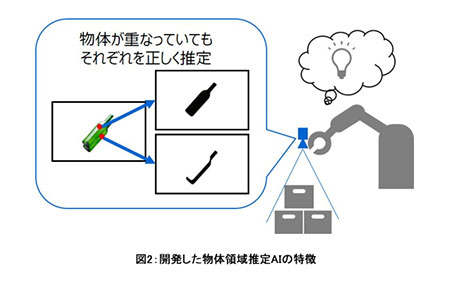 新方式では物体の領域を点で捉えるため重複していてもそれぞれの物体を正しく推定できる
新方式では物体の領域を点で捉えるため重複していてもそれぞれの物体を正しく推定できる
そこで同社は、物体同士の領域を判別する方式を新たに開発。通常の可視光カメラで撮影した画像からより高精度に荷物を判別することに成功した。公開データを用いたAIの実証実験において、従来の方式よりも推定制度を45%改善することができたという。
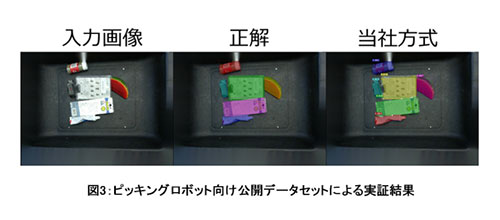 ピッキングロボット向け公開データセットによる実証結果
ピッキングロボット向け公開データセットによる実証結果
同AIは通常カメラの画像を用いるため3次元センサーを活用するAIよりも安価で、あらかじめ事前学習したニューラルネットワークを活用していることから現場での事前学習は必要なく、導入が容易だという。同社は今後、このAIを組み込んだ荷下ろしロボットを2021年度に市場投入する考えで、拡大傾向にある物流ロボット市場での拡販を目指す。(銭 君毅)
















