日本ユニシスは、18年から参画している「戦略的イノベーション創造プログラム(SIP)第2期/自動運転(システムとサービスの拡張)/仮想空間での自動走行評価環境整備手法の開発」(SIP自動運転)で、東京臨海部実証実験フィールドである臨海副都心地域(お台場)の環境を仮想空間上で再現したシミュレーションモデルの使用体験を11月2日から実施する。
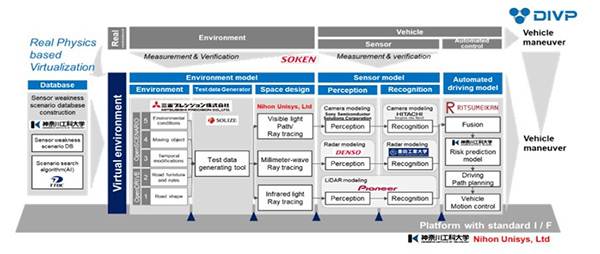 「DIVP コンソーシアム」体制図
「DIVP コンソーシアム」体制図
同社では、センサーメーカー、ソフトウェア会社、大学など、産学12機関からなる「DIVPコンソーシアム」を形成し、さまざまな交通環境下で再現性の高い安全性評価を行うため、実現象と一致性の高いシミュレーションモデルの開発に着手。このモデルに基づいた仮想空間での安全性評価プラットフォーム「DIVP(Driving Intelligence Validation Platform)」の構築に取り組んでいる。
今回、臨海副都心地域を再現したシミュレーションモデルの参加者は、DIVP検証プラットフォームプロトタイプ版「走行環境-電波伝搬-センサーモデル」でのシミュレーション実行結果と関連する情報、自動運転システムの開発、評価の有用性を確認できる。
シミュレーションモデルの使用体験では、実測に基づくNCAP環境、臨海副都心地域の仮想環境でのシミュレーション群を、シナリオパッケージとして用意。参加者は、このパッケージの実行結果で、実際の環境要因(運転環境、道路、地形、天候など)が組み合わされた現実の世界で起こり得るセンサーにとっての弱点(限界)を検証できる。また、この仮想空間でさまざまな条件設定で安全性検証の作業効率化などを確認する。
シミュレーションモデル使用体験の実施期間は、11月2日から22年1月末まで。自動運転技術の研究開発を行う国内外の自動車メーカー、自動車部品メーカー、大学などの法人・研究機関などを対象としている。実施に向けて、管理法人である新エネルギー・産業技術総合開発機構(NEDO)が10月15日まで参加者を募集する。